

Lectoraat Enabling technologies
Mechatronics & Robotics
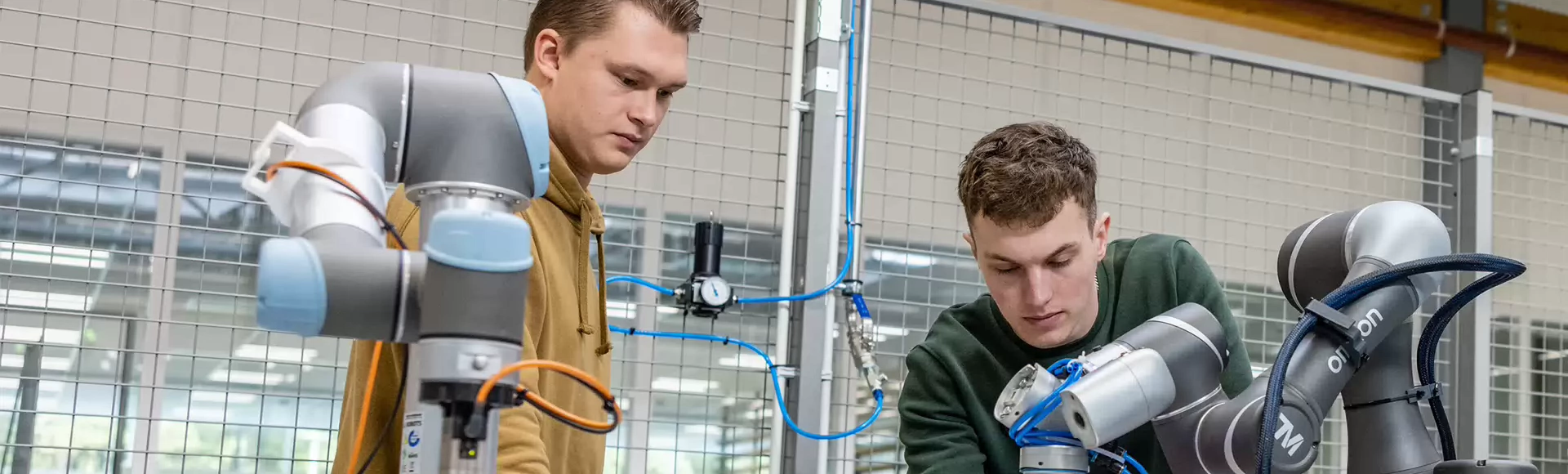
Het lectoraat Mechatronics & Robotics onderzoekt hoe robots in verschillende situaties kunnen samenwerken met mensen. Dit gebeurt op het gebied van productierobots en autonome robotica. Hierbij worden moderne technologieën zoals kunstmatige intelligentie, digital twinning en control engineering gebruikt.
Over lectoraat
Het lectoraat streeft naar de ontwikkeling van intelligente robots die direct hun gedrag kunnen aanpassen aan veranderende omstandigheden. Door sensoren en machine learning algoritmen te combineren, kunnen adaptieve robots veranderingen in hun omgeving analyseren en erop reageren. Hierdoor zijn ze in staat om complexe taken met meer precisie en efficiëntie uit te voeren. Het doel is om zeer geavanceerde robotische systemen te creëren die veilig kunnen werken in diverse industriële omgevingen, terwijl ze ook maximale efficiëntie, flexibiliteit en aanpassingsvermogen bieden.
De belangrijkste onderzoeksthema’s van het Lectoraat Mechatronics & Robotics zijn: Flexibele fabricage, Autonome Robotica en Veiligheid. Deze onderwerpen zijn essentieel voor de ontwikkeling van de volgende generatie robots.

Flexibele Fabricage
Het flexibel produceren van meerdere producten door 1 machine of robot, met zo min mogelijk omsteltijd. Het draait om het multifunctioneel maken van machines en robots. Wij onderzoeken nieuwe grijpertechnologie, nieuwe toepassingen en communicatie tussen verschillende machines.

Autonome Robotica
Het inzetten van mobiele robots op de werkvloer om producten tussen verschillende machines of robots te vervoeren. Wij onderzoeken hoe robots van verschillende leveranciers samen kunnen werken. Ook maken wij toepassingen met mobiele robots en machines.

Veiligheid
Hoe kunnen mens en robot samenwerken? We onderzoeken hoe we robots intuïtief gedrag kunnen laten vertonen, zodat mensen kunnen inschatten wat de robot gaat doen. Op die manier verbeteren we de samenwerking tussen mensen en robots en maken we deze veiliger.

Applied Biomedical Sciences and Engineering
De onderzoekslijn Applied Biomedical Sciences and Engineering (ABSE) combineert de kennis van de vakgebieden Applied Science en Engineering. In het werkveld is grote behoefte aan toekomstig professionals die kennis uit de medische, biologische en technisch vakgebieden kunnen combineren. Met die gecombineerde kennis zijn deze toekomstige professionals in staat om om geavanceerde medische apparatuur en interventies te ontwikkelen. Klik op de foto hierboven voor meer informatie over deze onderzoekslijn.
Onderzoeksprojecten
-
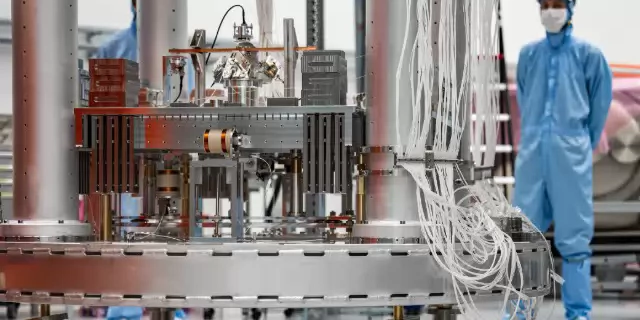
ETpathfinder Smart Skills Lab
Fontys onderzoekt en deelt kennis over onderhoud van de Einstein Telescope in het ETpathfinder Smart Skills Lab.
Lopend
-

ROBOsapiens
Het project ROBOsapiens ontwikkelt oplossingen om robots en mensen veilig met elkaar te laten samenwerken.
Lopend
-

Cobotassist
Project Cobotassist onderzoekt welke cobots (robot die met mensen samenwerkt) en robots de staal- en kunststofproducten het meest verbeteren.
Lopend
-

QRM4.0
QRM 4.0 helpt bedrijven hun productie te verbeteren met korte doorlooptijden. Dit project is onderdeel van het Europese Interreg-programma.
Afgerond
-
Een robot is geen superverspreider
In dit project zoeken wij naar low-cost oplossingen, gebaseerd op standaard beschikbare technologie, die voldoende goed zijn voor veel dagelijkse situaties. We denken daarbij bijvoorbeeld aan gekleurde of QR-markeringen op de grond met simpele ‘stations’.
Afgerond
Verbinding met onderwijs
Minor Adaptive Robotics
Op basis van resultaten en technieken uit ons onderzoek, creëren wij vernieuwend onderwijs voor onze studenten. Het lectoraat is verbonden aan de minor Adaptive Robotics. Daarnaast richten wij ons specifiek op het toepassen van nieuwe onderwijsmethoden en op het ontwikkelen van onderwijs voor professionals. Wij geven onder andere inspiratiesessies voor bedrijven in de maakindustrie en ontwikkelen online lesmateriaal.
Hybride leeromgeving
Het lectoraat Mechatronics & Robotics is gevestigd op de Brainport Industries Campus (BIC) in Eindhoven. In deze hybride leeromgeving werken bedrijfsleven, onderzoekers en studenten intensief met elkaar samen.


Driehoek student-onderzoeker-werkveld
De basis van onze werkwijze is de driehoek student, onderzoeker, werkveld. Hieronder enkele titels van projecten en afstudeerprojecten waar onderwijs en onderzoek in volle sterkte samenkwamen.
Afstudeerscripties
- Drone propeller noise modeling
- Localising sound sources using the Sorama L642
- Design and implementation of hardware platform of a flight controller with GSM connectivity
- Electromagnetic propeller: research into the integration of a propeller with an electromagnetic drive unit
- Quadcopter controller: implementing a flight controller of a multirotor system
Studentparticipatie - minor Adaptive Robotics
- Human position future position
Studentparticipatie - Stage
- Mobile Robotics Hardware Demonstrator
- Polishing path prediction
Studentparticipatie S7-project
- Mini-fluffy
- Polishing demonstrator
- Robosapiens: fluffy digital twin
Voor studenten
Minor Adaptive Robotics
Het gebruik van robots in de maakindustrie is de afgelopen jaren enorm toegenomen. In veel situaties werken robots en mensen samen in een dynamische omgeving. Wil je creatieve en technologische oplossingen bedenken voor robotica-toepassingen? En aan de slag met opdrachten voor het bedrijfsleven? Volg dan de minor Adaptive Robotics. De inhoud en begeleiding van deze minor is in handen van docentonderzoekers die gekoppeld zijn aan het lectoraat.

Fontys Meet & Match
Studenten kunnen het hele jaar door contact leggen met bedrijven die actief zijn in de technieksector. Op het platform van Fontys Meet & Match staan meer dan 500 bedrijfsprofielen. Log in en kies met welke bedrijven je in contact wilt komen. Ook Fontys docenten en onderzoekers kunnen hier terecht om de juiste connectie te maken.
Heb je al een profiel?
Als je al een profiel hebt op dit platform, dan kun je via deze link jouw persoonlijke link opvragen.
Nog geen profiel, wel interesse?
Wil je wel gebruik maken van deze uitgebreide bedrijvendatabase en heb je nog geen profiel? Dan kun je als student via deze link een profiel aanmaken.
Fontysmedewerkers
Wil je als Fontysmedewerker een kijkje nemen in de database ga dan naar deze link.

Impact
Onderzoekers van ons lectoraat nemen deel aan diverse evenementen om lezingen en presentaties te gegeven om kennis uit het onderzoek te delen. Hieronder vind je een overzicht van onze activiteiten.
Activiteiten
Project RoboSapiens - Demonstrator Precisiebeurs 11.2024
Lezingen en workshops
Onze reis met schoonmaakrobots: samenwerking en technologische uitdagingen
Lezing Agnes Berendsen - Beurs Vision, Robotics & Motion, Den Bosch - 06.2024
Technology Update BIC Campus Eindhoven - Presentatie Randy Kerstjens - 12.2023
Expertmeeting Steerco Future Experience Center BIC Campus Eindhoven
Presentatie Randy Kerstjens - 11.2023
Workshop System Engineering bij opleiding Mechatronica - Fontys Engineering S7- projecten Randy Kerstjens & Hester Verduin - 10.2023
Publicaties
Artikel over Cobotassist: mens en robot bewerken samen metaalproducten - Fontysnieuws - 01.2025

Agnes Berendsen tijdens de Vision, Robotics & Motion beurs 2024
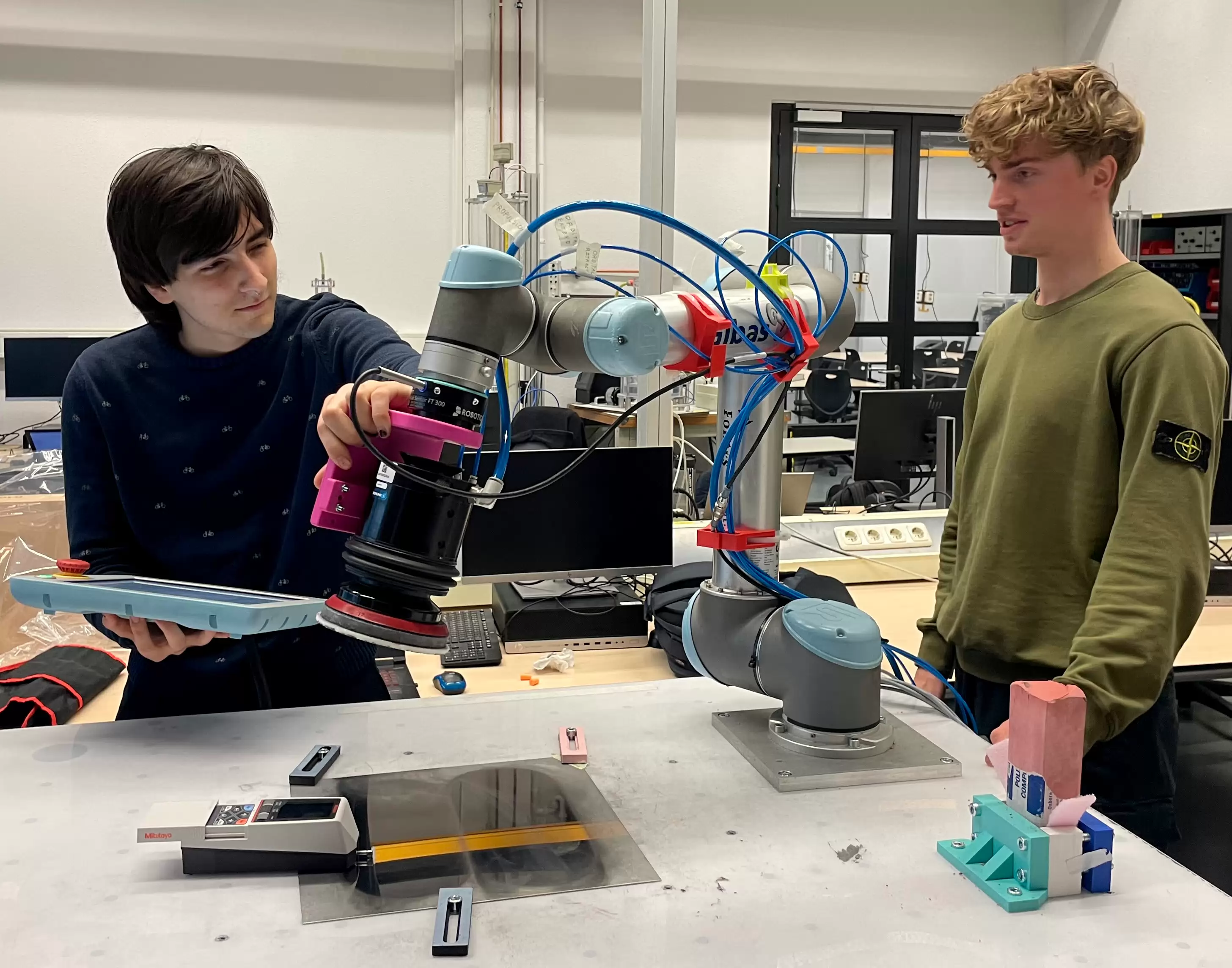 Studenten Youp en Daan met de Cobotassist
Studenten Youp en Daan met de Cobotassist
Partners
Het lectoraat Mechatronics & Robotics is partner in het Brainport Industrie Campus (BIC) Fieldlab Flexible Manufacturing. Daarnaast maakt het deel uit van de ISO werkgroep voor Safety & Modularity en is lid van euRobotics, de organisatie die het Europees robotica-onderzoek met elkaar verbindt. Ook nationaal houdt het lectoraat zich bezig met verschillende onderzoeksagenda’s via onder andere Holland High Tech, Holland Robotics en de
nationale werkgroep Mechatronica.
De activiteiten van het lectoraat sluiten goed aan bij het topsectorenbeleid van de overheid, binnen de topsector HTSM en de beweging dat Nederland steeds meer een (autonoom) maak-industrieland wordt. Daarnaast kijkt het lectoraat goed naar de behoeften van vele mkb-bedrijven die in de Brainportregio Eindhoven een toeleveranciersrol vervullen. De vraagstukken die deze toeleveranciers hebben richting multinationals als ASML en DAF worden meegenomen in de onderzoekagenda van het lectoraat.






